导读:RTLS是一种基于信号的无线电定位手段,可以采用主动式,或者被动感应式。其中主动式分为AOA(到达角度定位)以及TDOA(到达时间差定位)、TOA(到达时间)、TW-TOF(双向飞行时间)、NFER(近场电磁测距)等。
RTLS即 Real Time Location Systems的简称,实时定位系统。
RTLS是一种基于信号的无线电定位手段,可以采用主动式,或者被动感应式。其中主动式分为AOA(到达角度定位)以及TDOA(到达时间差定位)、TOA(到达时间)、TW-TOF(双向飞行时间)、NFER(近场电磁测距)等。
谈到定位,大家首先会想到GPS,基于GNSS(全球导航卫星系统)卫星定位已无处不在,但卫星定位有其关键弊端:就是信号无法穿透建筑物实现室内定位。
那么,室内定位问题如何解决呢?
随着室内定位市场需求驱动和无线通信技术、传感器识别技术及大数据互联技术、物联网等技术的不断发展,此难题也逐渐迎刃而解了,产业链不断丰富和成熟中。
室内定位从用途方向可以划分消费类和工业类。
消费类主要实现室内人员引导、消费推送、安全监控、智能家居等商业应用;
工业类主要实现消防安全、人员监控、设备引导、财产安全、智能工厂、智慧工地等应用。
一、蓝牙室内定位
蓝牙室内技术是利用在室内安装的若干个蓝牙局域网接入点,把网络维持成基于多用户的基础网络连接模式,并保证蓝牙局域网接入点始终是这个微网的主设备,然后通过测量信号强度对新加入的盲节点进行三角定位。
目前蓝牙 iBeacon 定位的方式主要有两种:基于 RSSI(接收信号强度指示)和基于定位指纹,或者两者结合。
基于距离最大的问题在于,室内环境复杂,而蓝牙作为2.4GHZ高频信号,会受到很大的干扰。加上室内的各种反射折射,手机所获取的 RSSI 值并没有太大的参考价值;而与此同时,为了提高定位精度,就不得不对 RSSI 值进行多次获取来平滑结果,这就意味着时延的增加。而基于定位指纹的最大问题在于,前期获取指纹数据的人力成本和时间成本非常高,数据库维护困难。而且如果商场增添了新的基站,或者进行了其他改造,原始的指纹数据可能就不再适用。所以,如何在定位精度、延时和成本之间进行权衡和取舍,就成了蓝牙定位的核心的问题。
市场上主流的蓝牙定位精度是70%的地段在2米以内,部分公司可以做到90%的地段在2米以内。目前市场上主流的蓝牙定位技术都是基于三角定位算法,通过手机获取周围蓝牙基站的信号强度,再通过其他的一些辅助方法比如加权平均算法,时间加权算法,惯性导航算法,卡尔曼滤波算法,高斯滤波算法等来计算出当前位置。
优势:设备体积小、短距离、低功耗,容易集成在手机等移动设备中;
缺点:蓝牙传输不受视距的影响,但对于复杂的空间环境,蓝牙系统的稳定性稍差,受噪声信号干扰大且在于蓝牙器件和设备的价格比较昂贵;
适用:蓝牙室内定位主要应用于对人的小范围定位,例如单层大厅或商店。

二、室内WiFi定位
Wi-Fi定位技术有两种,一种是通过移动设备和三个无线网络接入点的无线信号强度,通过差分算法,来比较精准地对人和车辆的进行三角定位。另一种是事先记录巨量的确定位置点的信号强度,通过用新加入的设备的信号强度对比拥有巨量数据的数据库,来确定位置。
优势:总精度较高,硬件成本低,传输速率高;可应用于实现复杂的大范围定位、监测和追踪任务。
缺点:传输距离较短,功耗较高,一般是星型拓扑结构。
适用:Wi-Fi定位适用于对人或者车的定位导航,可以于医疗机构、主题公园、工厂、商场等各种需要定位导航的场合。
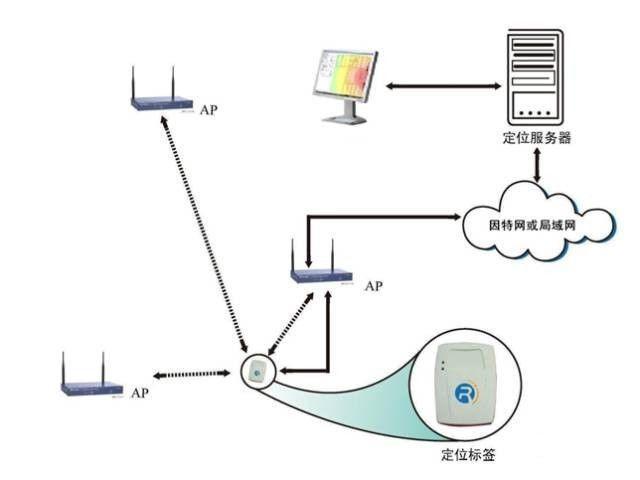
▲ Wi-Fi室内定位模式
三、RFID室内定位
射频识别(RFID)室内定位技术利用射频方式,固定天线把无线电信号调成电磁场,附着于物品的标签进过磁场后感应电流生成把数据传送出去,以多对双向通信交换数据以达到识别和三角定位的目的。
射频识别(英语:Radio Frequency IDentification,缩写:RFID)是一种无线通信技术,可以通过无线电讯号识别特定目标并读写相关数据,而无需识别系统与特定目标之间建立机械或者光学接触。
无线电的信号是通过调成无线电频率的电磁场,把数据从附着在物品上的标签上传送出去,以自动辨识与追踪该物品。某些标签在识别时从识别器发出的电磁场中就可以得到能量,并不需要电池;也有标签本身拥有电源,并可以主动发出无线电波(调成无线电频率的电磁场)。标签包含了电子储存
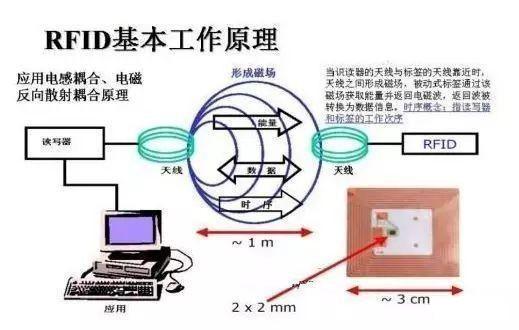
的信息,数米之内都可以识别。与条形码不同的是,射频标签不需要处在识别器视线之内,也可以嵌入被追踪物体之内。
优势:射频识别室内定位技术作用距离很近,但它可以在几毫秒内得到厘米级定位精度的信息;标签的体积比较小,造价比较低。
缺点:不具有通信能力,抗干扰能力较差,不便于整合到其他系统之中,且用户的安全隐私保障和国际标准化都不够完善。
适用:射频识别室内定位已经被仓库、工厂、商场广泛使用在货物、商品流转定位上。
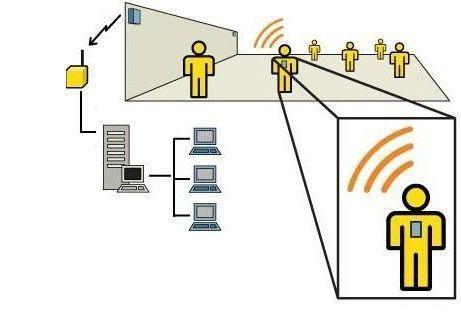
四、Zigbee室内定位
ZigBee(基于IEEE802.15.4标准的低功耗局域网协议)室内定位技术通过若干待测节点和参考节点与网关之间形成组网,网络中的待测节点发出广播信息,并从各相邻的参考节点采集数据,选择信号最强的参考节点的 X 和 Y 坐标。然后,计算与参考节点相关的其他节点的坐标。最后,对定位引擎中的数据进行处理,并考虑距离最近参考节点的偏移值,从而获得待测节点在大型网络中的实际位置。
ZigBee协议层从下到上分别为物理层(PHY)、媒体访问层(MAC)、网络层(NWK)、应用层(APL)等。网络设备的角色可分为ZigBee Coordinator、ZigBee Router、ZigBee End Device等三种。支持网络拓扑有星型、树型、网型等三种。

▲ Zigbee网络拓扑
优势:功耗低、成本较低、延时短、高容量以及高安全,传输距离较长;可支持网状拓扑,树状拓扑和星型拓扑
结构,组网灵活,可实现多跳传输。
缺点:传输速率低,定位精度对算法要求较高。
适用:目前zigbee系统定位已广泛应用于室内定位、工业控制、环境监测、智能家居控制等领域。
▲ Zigbee室内定位模式
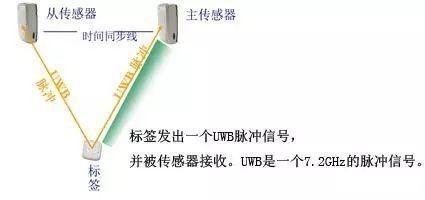
五、UWB定位技术
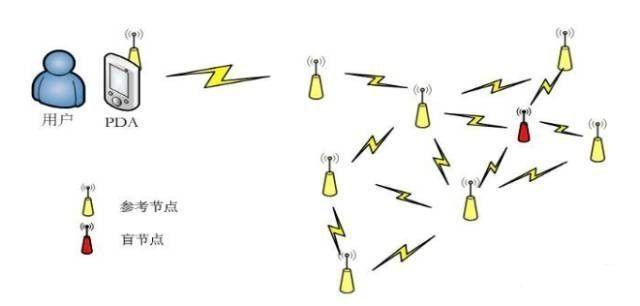
超宽带(UWB)定位技术是一种全新的、与传统通信定位技术有极大差异的新技术。它利用事先布置好的已知位置的锚节点和桥节点,与新加入的盲节点进行通讯,并利用三角定位或者“指纹”定位方式来确定位置。
超宽带无线(UWB)技术是近年来提出的室内高精度无线定位技术,具有高达纳秒级别的时间分辨能力,结合基于到达时间的测距算法,理论上可以达到厘米级的定位精度,可以满足工业应用的定位需求。
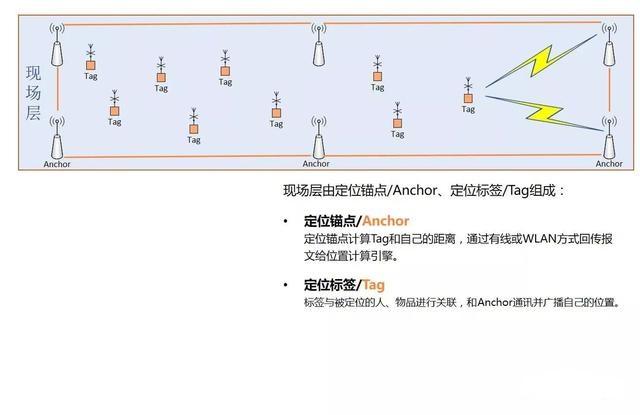
整个系统划分为三层:管理层、服务层、现场层。系统层次划分明确,架构清晰。
现场层由定位锚点/Anchor、定位标签/Tag组成:
定位锚点/Anchor
定位锚点计算Tag和自己的距离,通过有线或WLAN方式回传报文给位置计算引擎。
定位标签/Tag
标签与被定位的人、物品进行关联,和Anchor通讯并广播自己的位置。
优势:具有GHz量级的带宽,定位精度高;穿透力强,抗多径效果好、安全性高。
缺点:但由于新加入的盲节点也需要主动通信使得功耗较高,同时该系统成本高;
适用:超宽带技术可用于雷达探测,同时应用于各个领域的室内精确定位和导航。
▲ UWB室内定位模式
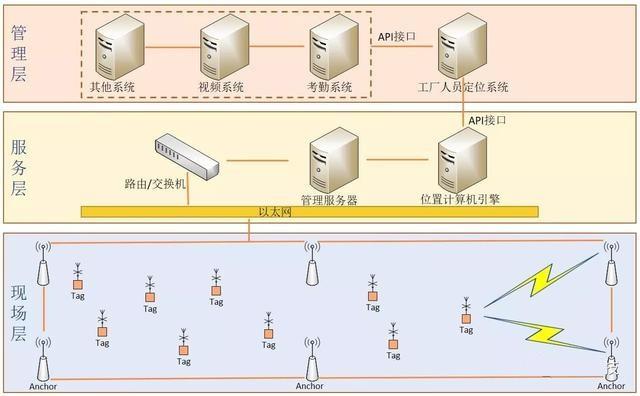
▲ 基于UWB的人员定位系统架构图

六、红外线室内定位
红外线室内定位有两种,第一种是被定位目标使用红外线IR标识作为移动点,发射调制的红外射线,通过安装在室内的光学传感器接收进行定位;第二种是通过多对发射器和接收器织红外线网覆盖待测空间,直接对运动目标进行定位。
优势:较高的室内定位精度,抗干扰能力强;
缺点:红外线只能视线传播,穿透性能极差,当标识被遮挡时就无法正常工作,也极易受灯光、烟雾等环境因素影响明显;
传输距离不长,使其在布局上,无论哪种方式,都需要在每个遮挡背后、甚至转角都安装接收端,布局复杂,成本较高。
适用:适用于实验室对简单物体的轨迹精确定位记录以及室内自走机器人的位置定位。
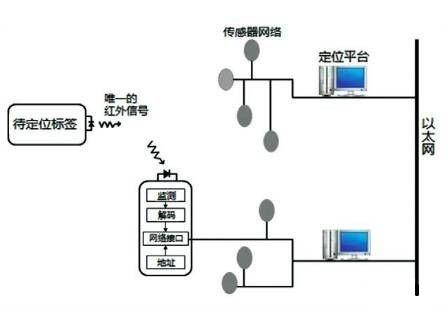
▲ 红外室内定位模式
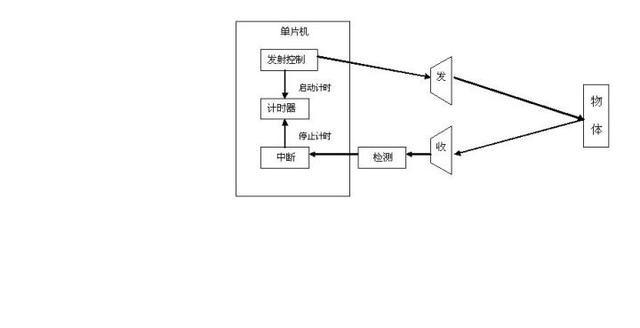
七、超声波定位
超声波定位技术是基于超声波测距系统而开发,由若干个应答器和主测距器组成:主测距器放置在被测物体上,向位置固定的应答器发射同无线电信号,应答器在收到信号后向主测距器发射超声波信号,利用反射式测距法和三角定位等算法确定物体的位置。
优势:定位整体精度很高,达到了厘米级;结构相对简单,有一定的穿透性而且超声波本身具有很强的抗干扰能力。
缺点:空气中的衰减较大,不适用于大型场合;反射测距时受多径效应和非视距传播影响很大,造成需要精确分析计算的底层硬件设施投资,成本太高。
适用:超声波定位技术在数码笔上已经被广泛利用,而海上探矿也用到了此类技术,室内定位技术还主要用于无人车间的物物定位。
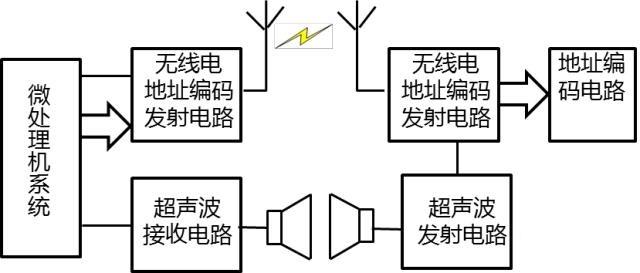
▲ 超声波室内定位模式

八、iBeacon
iBeacon定位
iBeacon是一种新型基于蓝牙4.0的精准室内微定位技术,目前iOS、Android、Windows和黑莓系统设备,均具备了蓝牙低能耗技术(BLE)。当你的手持设备靠近一个iBeacon基站时,设备就能够感应到iBeacon信号(UUID和RSSI),范围可以从几毫米到50米,通过加权三环定位算法即可得到精确的位置,常规可达到2m的精度。

▲ iBeacon
iBeacon是苹果公司提出的“一种可以让附近手持电子设备检测到的一种新的低功耗、低成本信号传送器”的一套可用于室内定位系统的协议。 这种技术可以使一个智能手机或其他装置在一个iBeacon基站的感应范围内执行相应的命令。
这是帮助智能手机确定他们大概位置或环境的一个应用程序。在一个iBeacon基站的帮助下,智能手机的软件能大概找到它和这个iBeacon基站的相对位置。iBeacon能让手机收到附近售卖商品的通知,也可以让消费者不用拿出钱包或信用卡就能在销售点的POS机上完成支付。iBeacon技术通过低功耗蓝牙(BLE),也就是智能蓝牙来实现。
iBeacon为利用低功耗蓝牙可以近距离感测的功能来传输通用唯一识别码的一个app或操作系统。这个识别码可以在网上被查找到用以确定设备的物理位置或者可以在设备上触发一个动作比如在社交媒体签到或者推送通知。
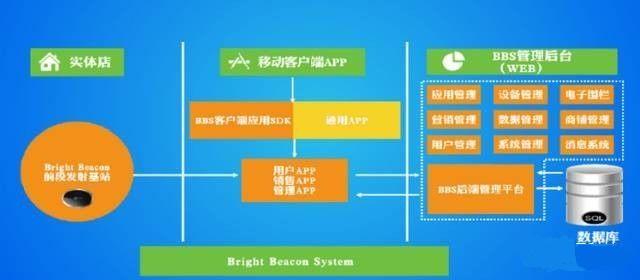
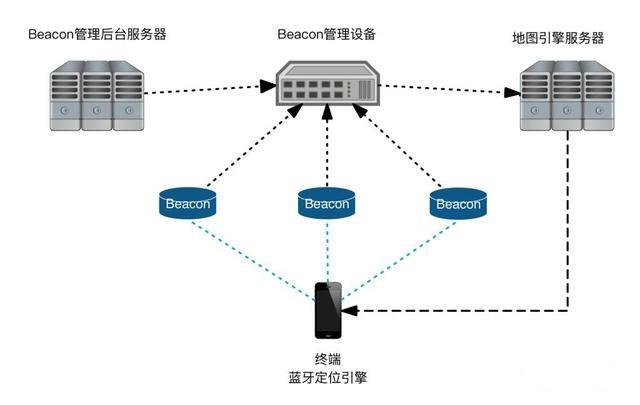
▲ iBeacon室内定位模式
以上是成型的主流的室内定位方案,每种定位模式均有其优势和劣势,随着室内定位和科技的发展,未来必定是多模式融合定位的结果,同时更大的难题是室内外无缝切换定位解决方案。
常用定位原理介绍。
一、TOA定位技术原理
TOA也被称为圆周定位技术,实际定位过程中通过设备发射电磁波测量得到当前定位点到三个标定点的时间:t1、t2、t3。根据电磁波的传播速度是光速的知识,很容易得到三边距离r1,r2,r3。利用平面几何的两点距离公式,我们构建方程组,求解出定位位置。

仔细看一下上图,大家都会发现,定位过程中需要对两个时间点进行测量,就是开始时间t0和到达时间t1,t2,t3,这四个时间变量直接影响测量距离。由此可见,TOA算法对系统的时间同步要求很高,因为即使有很小的时间误差,但是乘以光速,误差就会被放大很多倍。因此,如何保持各设备间的时钟高精度同步问题,是很多专业定位设备包括GPS系统中需要解决的重要问题。
二、TDOA定位技术原理
TDOA也被称为双曲线定位技术,其所依赖的几何知识是,如果测定待定位点到周围两个标定点的传播距离差,则待定位点肯定在以这两个标定点为焦点,点到两个焦点的距离差值为传播距离差的双曲线上。

如上图,ri1为距离差值,通过对其计算公式化简,很容易将公式中t0消除,避免了对t0的测量误差引入,这样定位系统只要保证同时发送测量信号,然后精确测量到达时间差即可,减少了时间测量误差影响。TDOA技术常用的算法有Fang算法、Chan算法、Taylor级数展开算法。若大家对这些算法感兴趣,可以通过维基百科进一步了解。
三、AOA定位技术原理
AOA也被称为方位角定位技术。根据平面几何知识,两条射线平行或相交于一点,通过设备测量待定位点到两个标定点间的入射角,很容易确定待定位点的位置。
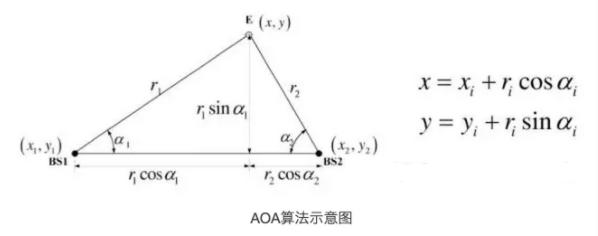
如上图,通过变化公式,很容易消除变量r,直接求解二元一次方程,很容易得到待定位点位置。
相比TOA、TDOA等,AOA机制不需要时间同步,实现同维度的定位任务所需要的参考节点数量最少,例如二维平面定位只需要两个基站。但该方法必须有方向性较强的天线阵列支持。
四、RSSI定位技术原理
RSSI为信号强度,基于信号强度进行定位。根据物理知识,我们能够知道一些信号在自由空间传播遵循固定的衰减模型,通过该模型我们能够给出信号强度与距离远近的准确关系。如下图。
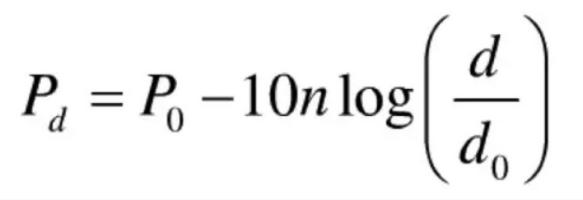
其中,pd为待定位点接收到的信号强度。p0为距离辐射源d0处的信号强度。n 为信号衰减系数。现阶段蓝牙室内定位技术就是基于该原理。
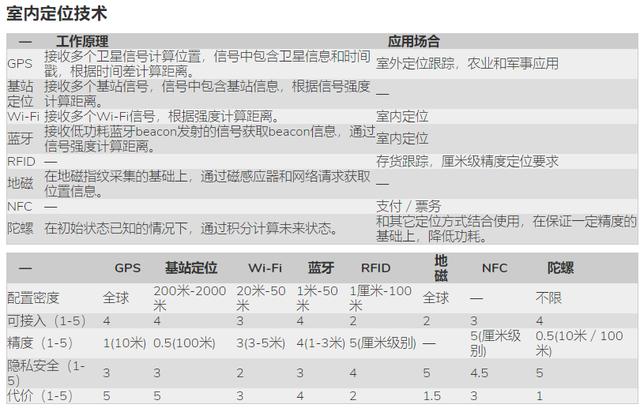
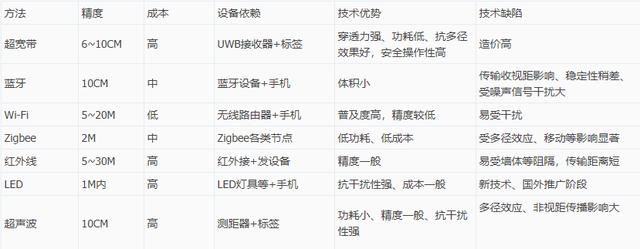
附加几张各个定位技术对照表。