

导读:当前毫米波雷达的局限性,有很大的关系,无法感知静止物体的感知,主要靠视觉摄像头。
上一篇文章写了《从小鹏P7事故看智能驾驶的最后一道防线AEB(自动紧急制动)》点出了当前影响智能驾驶以及AEB安全性能的因素其中很重要的一条是,传感器的能力。例如当前毫米波雷达的局限性,有很大的关系,无法感知静止物体的感知,主要靠视觉摄像头。而视觉感知就比较容易受环境光线以及AI样本库标记丰富度影响。
所以当前业内普遍认为,理论上,激光雷达和4D成像毫米波雷达,都可以识别出障碍物的轮廓、类别并进行感知和预判。如果在现有的辅助驾驶系统上能再结合激光雷达或者4D成像毫米波雷达,就可以一定程度上补齐视觉摄像头和毫米波雷达的短板。
我在之前写过智能驾驶传感器激光雷达,摄像头等系列传感器文章,可以搜索历史查看,今天我们来分享下有关4D毫米波雷达的相关知识,试着去解答以下问题:
什么是4D毫米波雷达,他为什么叫4D和普通毫米波雷达有什么不同?
他背后的技术方案是什么样的?,如何实现,当前主流的方案是?他的供应链有哪些?
当前有哪些品牌生产,价格怎么样?未来应用趋势如何,能实现怎么样的功能?
希望能给大家带来一些信息和启发。
什么是4D毫米波雷达,他为什么叫4D和普通毫米波雷达有什么不同?
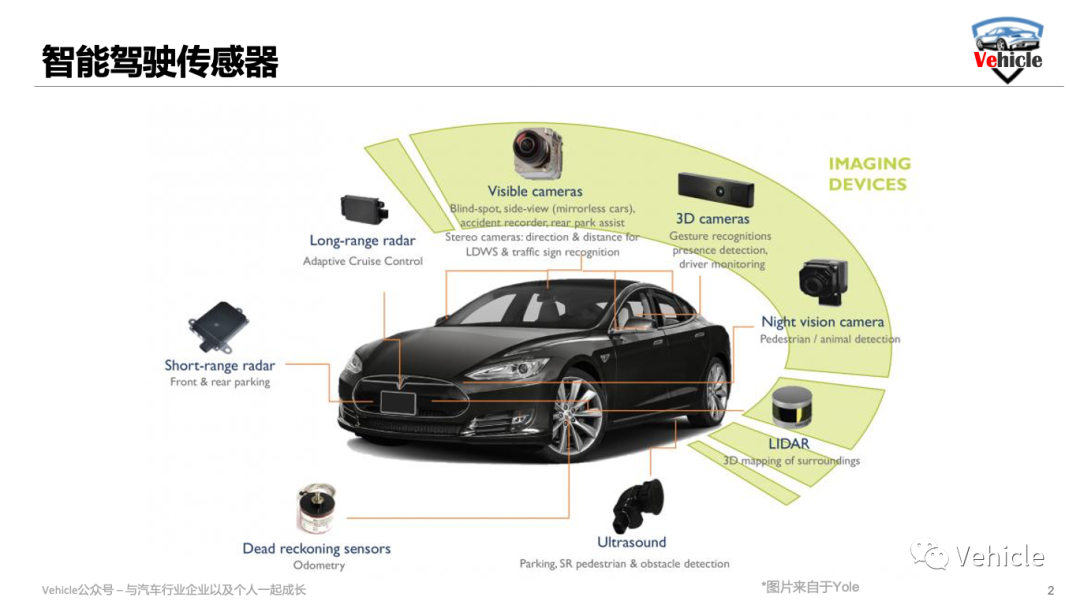
雷达,是一种利用电磁波探测目标的电子设备。其基本原理是,雷达发射电磁波,电磁波到达目标后反射,雷达的接收器收到回波,由此获得目标至电磁波发射点的距离、相对速度、方位等信息。
目前汽车毫米波雷达频率分为24GHz(严格来说属于厘米波雷达,但由于性能和毫米波雷达相似,通常归为毫米波雷达), 77GHz至79GHz三种频段。但是根据2021年12月发布的《汽车雷达无线电管理暂行规定》中,要求加强汽车雷达无线电管理,将76-79GHz频段规划用于汽车雷达,同时规定不再受理和审批24.25-26.65GHz频段车载雷达无线电发射设备型号核准申请。也就是说,今后的新增的汽车毫米波雷达,只有76GHz-79GHz的了。
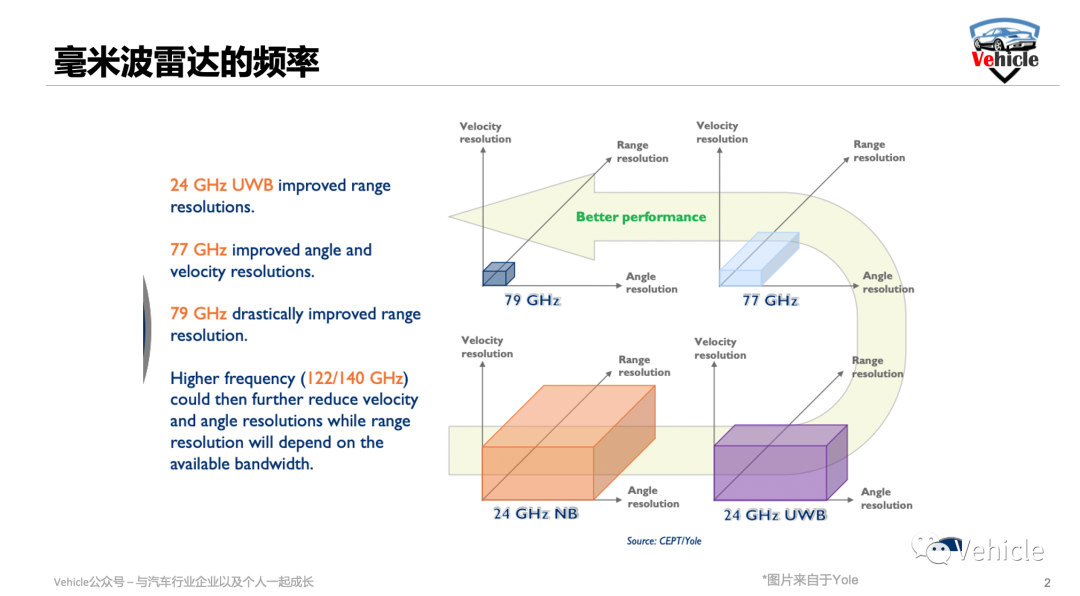
77Ghz毫米波雷达分辨率相对高,抗干扰性能强,探测性能好,尺寸较小,是目前ADAS系统中不可或缺的传感器。
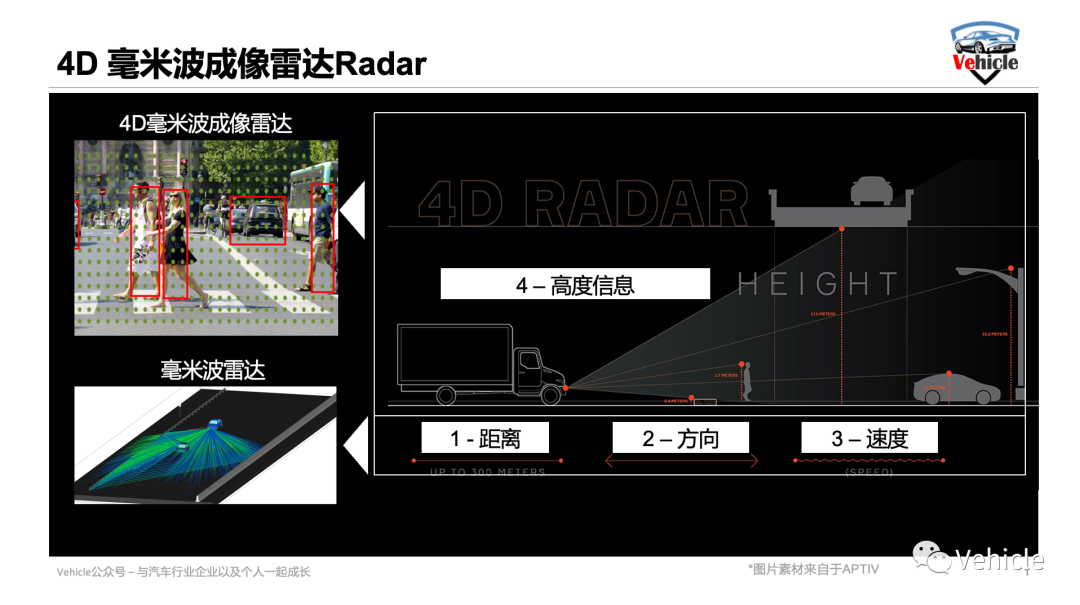
当前汽车的毫米波雷达主要用于确定目标和发射点的距离、相对速度、方位等信息,所以汽车普通的雷达也叫3D毫米波雷达。4D 毫米波雷达之所以称为 4D,是因为它不仅可以检测物体的距离、相对速度和方位角(球坐标系中的角度测量值),还可以检测物体高于道路水平面的高度,这里不代表高度是第四维(4D),其实时间是第四维。4D毫米波雷达利用时间来确定高度相关的信息。
市面上量产的77GHz雷达,返回的是被测目标的抽象图像你可以认为就是一团深颜色的东西,他不像我们之前文章《智能驾驶要用多少个激光雷达?分别放在哪里?什么作用?》讲的激光雷达能识别边缘,所以它不能用于分类,无法把环境周边静态的东西,例如树,围栏等等与停放的车辆和人区分开来,因此在高速公路上,算法对静态物体进行忽略,以防止车辆误刹车。此外,对于自动驾驶来说,重要参数是识别和过滤误报。
而4D毫米波雷达由于拥有立体探测能力和一定的边缘轮廓识别,可以滤除假警报,提供最佳的灵敏度。雷达使用最低的检测阈值,即使是最微弱的噪声也能被报告出来。后处理和跟踪用于过滤随机噪声,而校准方案允许达到极低的旁瓣水平。
4D毫米波雷达另外还能够提供真实的路径规划,可以在300米以上的范围内创建道路的详细图像(类似于激光雷达的点云),捕捉和识别汽车周围物体的大小(加上边缘的识别,这也就是为啥有人叫4D成像雷达)、位置和速度数据,这也就是为啥很多人觉得他拥有部分激光雷达的功能。
他背后的技术方案是什么样的?如何实现,当前主流的方案是?他的供应链有哪些?
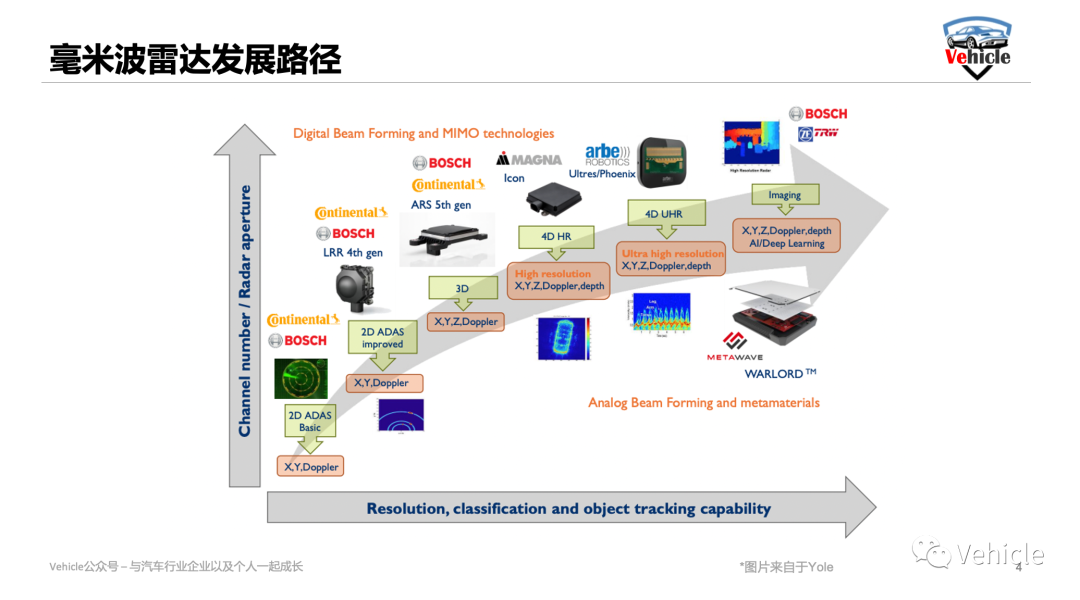
4D 成像雷达的底层原理和普通毫米波雷达底层技术类似,典型的雷达系统使用一组天线元件,每个元件都有一个宽波束。然后,他们可以通过称为数字波束形成的过程以数字方式组合这些以创建窄波束阵列,从而提高最终图像的分辨率。
3D 和 4D 雷达之间的区别在于这些天线元件的排列方式。3D 雷达系统具有水平排列的天线,而 4D 雷达具有水平和垂直排列的元件。

4D 雷达与基于两到三个发射天线和三到四个接收天线的传统雷达解决方案不同,为了提高分辨率映射车辆周围的环境,4D 成像雷达利用多输入多输出 (MIMO) 多达48 天线阵列(未来可能更多)对其周围环境进行高分辨率映射。点云数据输出(表示对象的数据集)与宽方位仰角视场 (FOV) 相结合,可针对桥下交通堵塞等情况提供更准确的检测和跟踪。
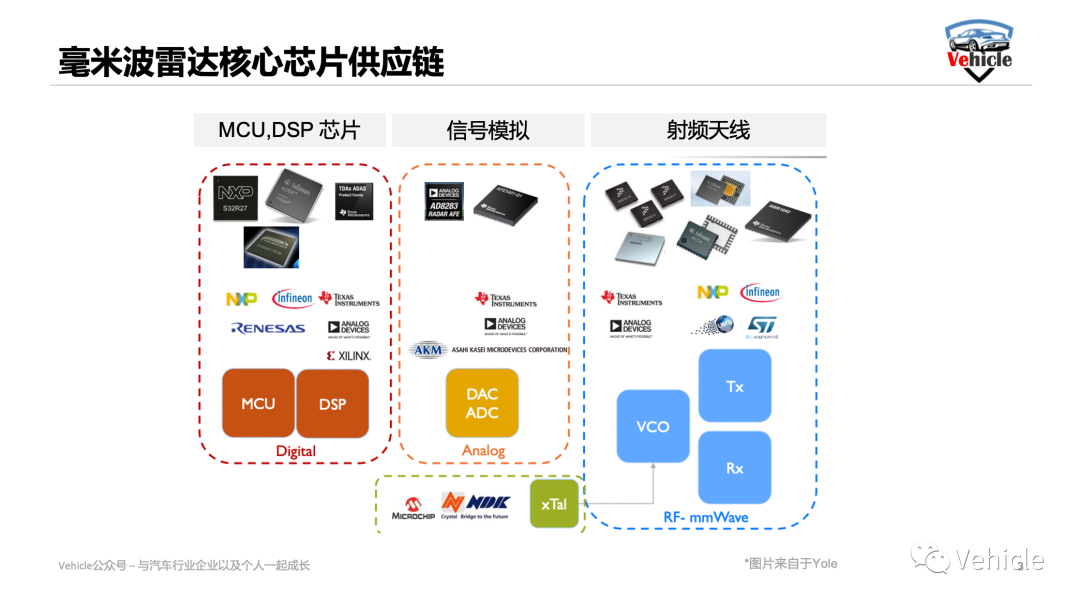
毫米波激光雷达的一般核心零部件为收发器、一个内部数字信号处理器 (DSP) 和一个用于实时信号处理的微控制器单元 (MCU),还有信号模拟芯片等。
4D毫米波雷达的技术和创新也是基于以上核心部件进行,当前共有三种主流技术,可以实现4D毫米波雷达的点云功能:
第一种是MIMO芯片级联。传统毫米波雷达芯片供应商多采用基于77GHz/79GHz标准雷达芯片的多级联方式,从而提升功率和角分辨率。
大陆博世采埃孚等传统毫米波雷达供应商均采用这种方案的雷达芯片实现4D成像毫米波雷达。
这种方案的优点在于产线链和技术比较成熟,相对容易落地。弊端是雷达的尺寸大,不利于装车,功耗特别大,散热很难。另外由于这些方案往往需要采用更多的芯片硬件,成本也会比较高。主流tier 1的传统毫米波雷达价格大约70-80美元,4D毫米波雷达的价格大约要到150-200美元。
第二种:通过将多发多收天线集中在一个芯片中,通过研发芯片组来实现上述功能。这种方案其实与芯片级联类似,但是将天线,MMIC等进一步集成至芯片级别,可以将雷达进一步小型化。目前,该技术的代表公司主要有Ainstein、Arbe、Oculii、RFIsee、Vayyar、Aeres EM、Cognitive、Unhder等雷达新势力。
Arbe公司基于格芯22FDX工艺自主开发的雷达芯片组解决方案—“Phoenix”,尺寸仅拇指大小。Arbe的4D成像雷达目前的价格在300-400美元,Arbe公司预计,随着市场规模的扩大和供应链的成熟,未来可以降低到50美金左右。
第三种:通过使用自适应超材料来解决上述问题。所谓自适应超材料,是将智能化引入材料的结构中,以实现可编程功能。工程设计可以从被动形式转变为主动形式,以利用动态和任意电磁(EM)波场来开发可编程的超表面。可以简单理解为,这种材料能接受和响应外部信息,自动改变自身状态,以适应外部环境变化。该技术的代表公司主要包括MetaWave、EchoDyne等。
这种方案的优势是电路可以做到非常小,不过受限于上游超材料供应链基础较弱,商业化仍有很长的时间要走。
当前有哪些品牌生产,价格怎么样?未来应用趋势如何?
4D毫米波雷达算是3D毫米波雷达的升级版。与激光雷达相比,首先4D毫米波雷达的成本上仅为激光雷达的10%-20%,其次,激光雷达存在一个缺陷:容易受到雨雾天气变化的影响。而4D成像雷达就算遇到下雨天气,侦测范围还是可以达到300米。最后如我之前文章《通过广州车展-看自动驾驶激光雷达》中介绍当前激光雷达主流为MEMS方案其实内部还是存在机械零部件所以,存在使用寿命等方面的担心。
但是4D毫米波的点云数量是远少于激光雷达,仅仅相当于8-16线的早期激光雷达,当前激光雷达主流128线,所以从智能AI和精准性方面来看激光雷达有他独特的优势。
所以,4D毫米波雷达一方面可以逐步取代传统的3D毫米波雷达,另一方面可以作为激光雷达的补充或替代,随着自动驾驶技术的进一步发展,4D毫米波雷达的渗透率会逐渐增加。
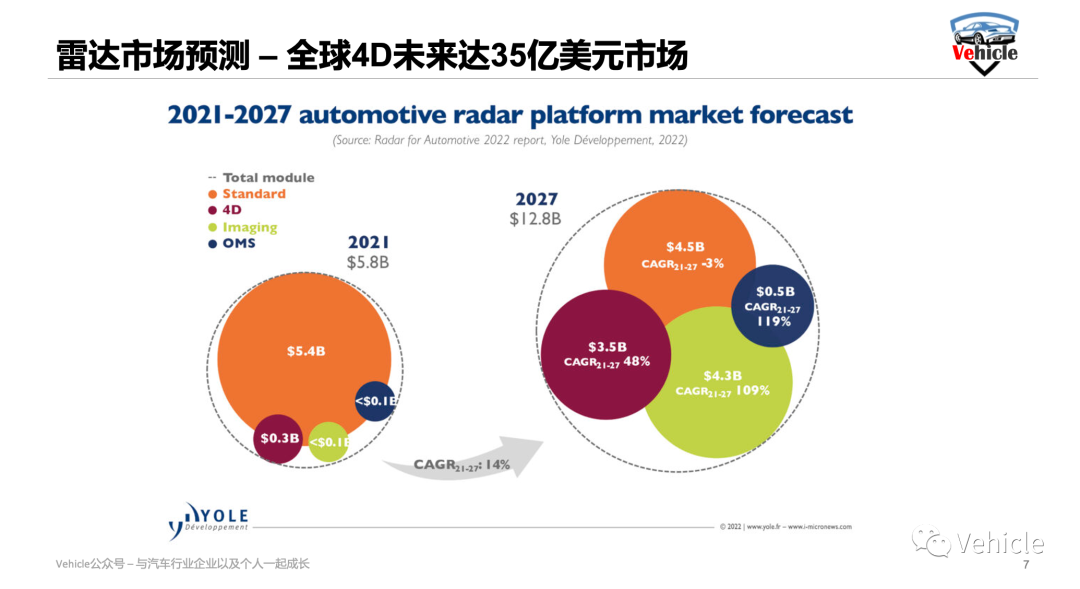
根据Yelo 的预测未来全球4D毫米波雷达的市场在2027年达35亿美元。据中金公司预计,至2025年中国车载4D成像雷达市场规模在悲观、中性、乐观情况下有望分别达到1.9亿美元、3.6亿美元、5.4亿美元。

当然这个赛道上也是挤满了人,和汽车新能源一样,传统巨头们都在做例如Continental、Bosch、Hella、Denso、Aptiv 和 Veoneer,还有不少新势力杀入例如Ainstein、Arbe、Oculii、RFIsee、Vayyar、Aeres EM、Cognitive、Unhder。中国也不少,例如华为,华域,福瑞泰克,森思泰克,纵目。还有创业的楚航科技,威孚科技。
所以通过以上发现,其实4D毫米波雷达大批量应用的条件已经具备,可以预见,接下来会大批量出现在我们日常使用的汽车上面,也会推高当前智能驾驶汽车的功能和安全体验,助力智能汽车的发展。
